RoboCup Soccer
There are five leagues in RoboCup Soccer. You could find more information at RoboCup wiki.
1.Small Size League
Small Size robot soccer is one of the RoboCup league divisions. Small Size robot soccer, or F180 as it is otherwise known, focuses on the problem of intelligent multi-agent cooperation and control in a highly dynamic environment with a hybrid centralized/distributed system.
@RoboCupWiki
2.Middle Size League
@RoboCupWiki
3.Humanoid League
In the Humanoid League, autonomous robots with a human-like body plan and human-like senses play soccer against each other. Unlike humanoid robots outside the Humanoid League the task of perception and world modeling is not simplified by using non-human like range sensors. In addition to soccer competitions technical challenges take place. Dynamic walking, running, and kicking the ball while maintaining balance, visual perception of the ball, other players, and the field, self-localization, and team play are among the many research issues investigated in the Humanoid League. Several of the best autonomous humanoid robots in the world compete in the RoboCup Humanoid League.
@RoboCupWiki
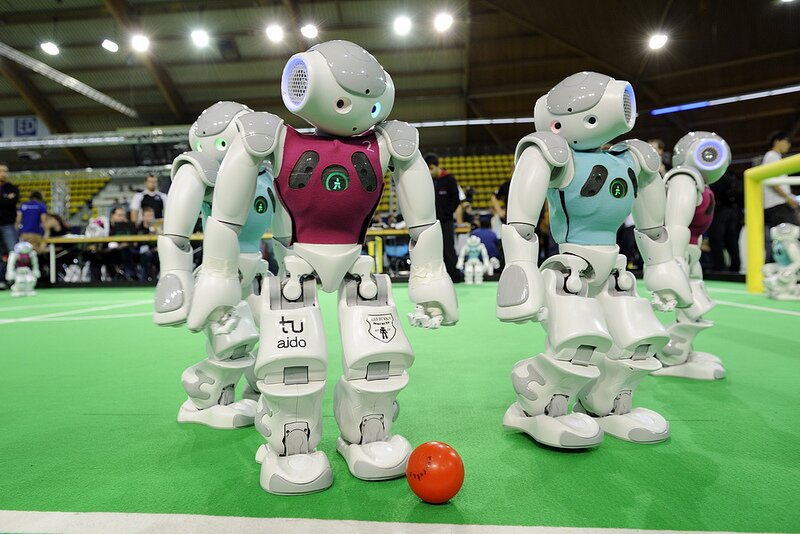
4.Standard Platform League
The RoboCup Standard Platform League is a RoboCup robot soccer league, in which all teams compete with identical robots. The robots operate fully autonomously, i.e. there is no external control, neither by humans nor by computers. The current standard platform used is the humanoid NAO by Aldebaran Robotics.
@RoboCupWiki
5.Soccer Simulation League
Without the necessity to maintain any robot hardware, the RoboCup Simulation League's focus comprises artificial intelligence and team strategy.
@RoboCupWiki